Frank Henry Acasiete Quispe ![[*]](footnote.png)
![]()
How to cite this article:
Acasiete, F. Método de Diferencias Finitas Explícito para la solución de la ecuación de la onda acústica en un dominio heterogéneo. Selecciones Matemáticas. 2019; 6(2):289-296.
http://dx.doi.org/10.17268/sel.mat.2019.02.15
Palabras clave. Ecuación diferencial parcial, onda, diferencias finitas, dominio heterogéneo.
Explicit Finite Differences Methods (FDM) are used for numerical simulations in seismic problems. In these cases the medium is heterogeneous and for the guarantee of a precise and stable solution there is the need to use refined discretizations for spatial and temporal variables, resulting in large-scale problems. In this paper we present the explicit FDM for the wave equation in a heterogeneous domain and show the results through computer simulations.
Keywords. Partial differential equations, wave, finite differences, heterogeneous domain.
Los Métodos de Diferencias Finitas (MDF) explícitos son frecuentemente utilizados en la solución numérica de estos problemas y en este caso, el refinamiento de las discretizaciones espacial y temporal están relacionados a la menor longitud de onda que debe ser capturada y limitada por la condición de estabilidad del método utilizado, respectivamente [1,3,2]. La precisión de estos métodos depende de la orden de aproximación de los operadores de diferencias finitas y del refinamiento de la malla. Mallas más refinadas resultan en aumento de precisión, esto puede acarrear el crecimiento sustancial en el uso de memoria y tiempo de procesamiento, esto puede hacer que el costo computacional sea muy alto para el modelamiento de problemas realistas. En el caso de aplicaciones de MDF en dominios heteogéneos, como ocurre en problemas de sísmica, los algoritmos convencionales usan, para garantizar la estabilidad numérica de la solución, la discretización temporal dada por el menor paso de tiempo, definido por la sub-región del dominio con la mayor velocidad de propagación de la onda. De esta forma, existen diversos estudios en busca de una solución precisa y viable computacionalmente para este problema, entre ellas, esquemas de diferencias finitas de malla variable [9], utilización de operadores de alto orden para aproximar las derivadas espaciales y temporales [7,4] y por lo tanto la mayoria de los algoritmos utilizados para la resolución de este problema utilizan métodos explícitos, también existen trabajos que analizan la utilización de métodos implícitos [10,5].
En este trabajo mostraremos la discretizacón del Método de Diferencias Finitas (MDF) expícito, con aproximaciones de segundo orden en el tiempo, de segundo orden y de cuarto orden para aproximar las derivadas espaciales. La aproximación explícita de diferencias finitas para la ecuación de la onda acústica utilizando aproximaciones de segundo orden en el tiempo y en el espacio, MDF(2-2), es dada por:
Desarrollando (2.2) obtenemos:
siendo ![]() el número de Courant
el número de Courant
![]() , donde
, donde ![]() y
y ![]() definen las discretizaciones temporales y espaciales, respectivamente, con
definen las discretizaciones temporales y espaciales, respectivamente, con
![]() . Los índices
. Los índices ![]() y
y ![]() designan los puntos de la malla espacial en las direcciones
designan los puntos de la malla espacial en las direcciones ![]() y
y ![]() respectivamente, en cuanto
respectivamente, en cuanto ![]() designa el instante del tiempo actual. Análogamente, se presenta en (2.5) la expresión del MDF explícito cuando se utilizan aproximaciones de diferencias finitas de segundo orden para la variable temporal y de cuarto orden para las variables espaciales, MDF(2-4).
designa el instante del tiempo actual. Análogamente, se presenta en (2.5) la expresión del MDF explícito cuando se utilizan aproximaciones de diferencias finitas de segundo orden para la variable temporal y de cuarto orden para las variables espaciales, MDF(2-4).
Desarrollando (2.4) obtenemos:
Las aproximaciones de Diferencias Finitas descritas anteriormente son condicionalmente estables y sus límites de estabilidad para dominios uni y bidimensionales, dados en términos del número de Courant, son presentados en la Tabla 2.1 que se encuentra en [8], para aproximaciones de segundo orden en el tiempo y de segundo y cuarto orden en el espacio.
Aplicaciones de estos algoritmos convencionales en medios heterogéneos, tiene la discretización espacial definida por la menor longitud de onda, que se desea representar y la discretización temporal constante, limitada por la condición de estabilidad de la sub-región que lleva el menor paso del tiempo, implicando en un gran costo computacional.
con condiciones iniciales y de contorno correctamente definidas.
Para el MDF explícito con aproximaciones temporal y espacial de segundo orden (2-2), se obtiene la siguiente expresión:
y el error de dispersión, conforme presentado en [6], puede ser dado por:
Colocando este resultado en términos de la velocidad de grupo normalizada, definida como
![]() , (2.8) puede ser reescrito como:
, (2.8) puede ser reescrito como:
Para ejemplificar el comportamiento del error de dispersión cuando se utilizan las mismas discretizaciones, temporal y espacial, el número de Courant será alterado variándose la velocidad de propagación de onda.
Se puede observar que, como es presentado en [1], el error de dispersión en el MDF es menor cuando el número de Courant es mayor, en este caso próximo al límite de estabilidad del método.
Al haber una discontinuidad, como es el caso de nuestro problema, procederemos con nuestro método de diferencias finitas manteniendo nuestro número de Courant abajo del límite de estabilidad como está en la Tabla 2.1 para obtener los resultados que deseamos. A diferencia del método usado en [2] usaremos el MDF para nuestro problema y procuraremos obtener mejores resultados refinando más la malla del dominio usado.
Para nuestros resultados usaremos en los casos
![]() ; la Sub-región 1 tiene la menor velocidad de propagación
; la Sub-región 1 tiene la menor velocidad de propagación
![]() , la Sub-región 2 tiene la mayor velocidad de propagación
, la Sub-región 2 tiene la mayor velocidad de propagación
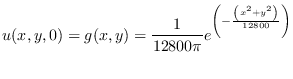
![]() , con la siguiente condición inicial:
, con la siguiente condición inicial:
La Fig. 3.1 representa ![]() , cuya solución en
, cuya solución en ![]() es la siguiente:
es la siguiente:
y
![]() . La condición de contorno es la de Dirichlet,
. La condición de contorno es la de Dirichlet,
![]() , siendo
, siendo ![]() el contorno del dominio considerado, definido por
el contorno del dominio considerado, definido por
![]() y
y
![]() .
.
Para las pruebas usamos fuente nula esto es
![]() . Usamos
. Usamos
![]() ;
;
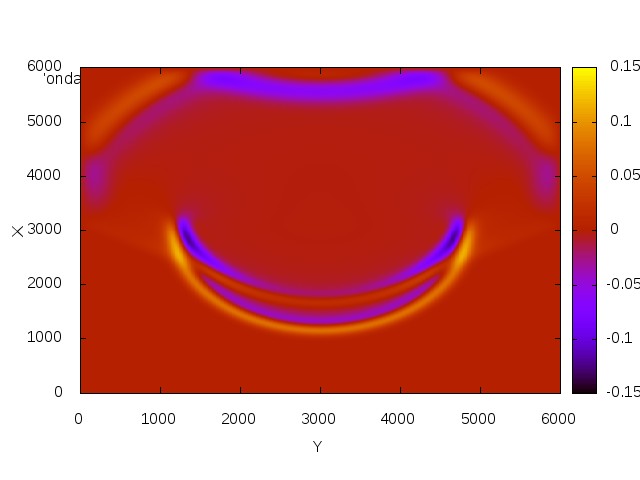
![]() , para mantener el número de Courant con el mismo valor y no tener problemas de dispersión en las simulaciones; usamos el método explícito de cuarto orden en el espacio y segundo orden en el tiempo. Los resultados son los siguientes; usamos las condiciones de frontera de Dirichlet, usamos estas condiciones para poder simular el caso en el cual el dominio no tuviera condiciones de frontera, ya que estamos en un dominio cuadrangular; para que la onda se propague uniformemente y el dominio tendrá reflexión, como se podrá ver en la Fig. 3.7:
, para mantener el número de Courant con el mismo valor y no tener problemas de dispersión en las simulaciones; usamos el método explícito de cuarto orden en el espacio y segundo orden en el tiempo. Los resultados son los siguientes; usamos las condiciones de frontera de Dirichlet, usamos estas condiciones para poder simular el caso en el cual el dominio no tuviera condiciones de frontera, ya que estamos en un dominio cuadrangular; para que la onda se propague uniformemente y el dominio tendrá reflexión, como se podrá ver en la Fig. 3.7:
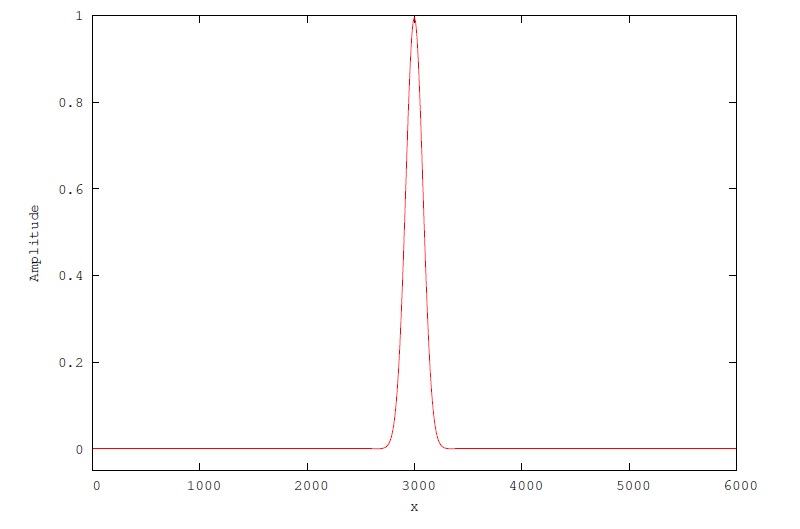
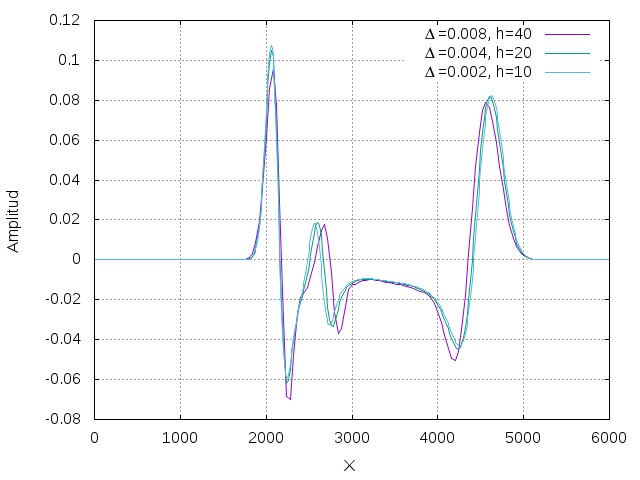
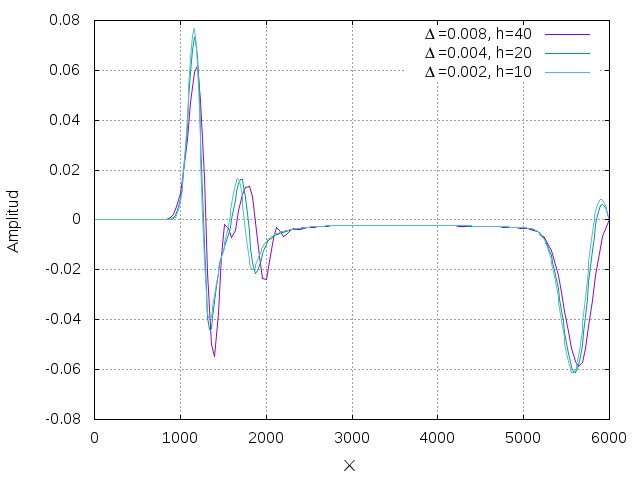
En las Fig 3.2, 3.3, 3.4, tenemos el corte en la mitad del dominio en el eje ![]() , con las diferentes discretizaciones espaciales y los tamaños de paso
, con las diferentes discretizaciones espaciales y los tamaños de paso ![]() .
.
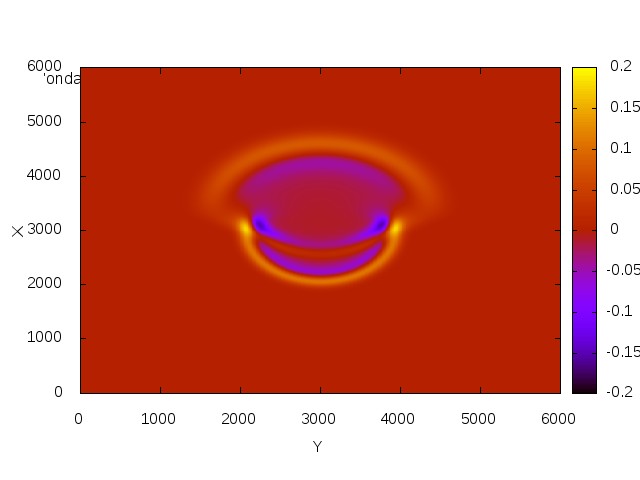
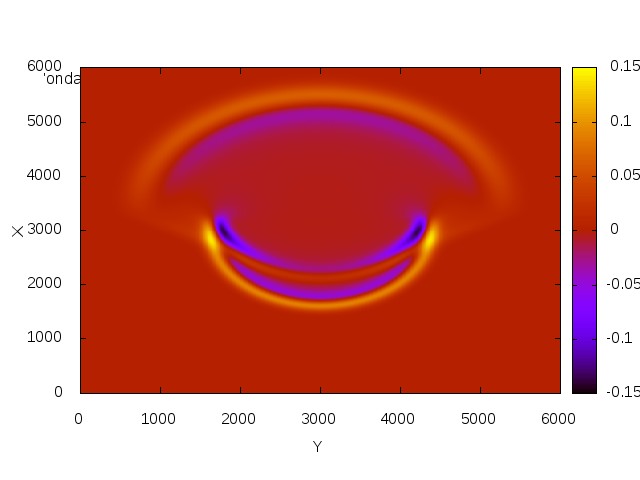
En las Fig. 3.5, 3.6, 3.7; tenemos la propagación de onda a través del dominio establecido y podemos observar la mayor propagación en donde la velocidad es mayor.
ORCID and License
Frank Acasiete Quispe https://orcid.org/ 0000-0002-3380-3606.
This work is licensed under the Creative Commons Attribution-NoComercial-ShareAlike 4.0.




![$\displaystyle \omega = \frac{2}{\Delta t}sen\left[ c \frac{\Delta t}{\Delta x}sen \left(\frac{\Delta x}{2} \right) \right] .$](img37.png)
![$\displaystyle \frac{v_{g}}{c}= cos\left( \frac{k \Delta x}{2} \right) \left[ 1-...
...lta x^{2}} sen^{2}
\left( \frac{k \Delta x}{2} \right) \right] ^{- \frac{1}{2}}$](img39.png)